99thpercentile
Full Member
- Joined
- Nov 2, 2006
- Messages
- 165
- Reaction score
- 130
- Golden Thread
- 0
- Location
- Evergreen, CO
- Detector(s) used
- Geonics EM61-MK2, Geophex GEM-3, GapEOD UltraTEM III, Minelabs F3, Foerster MINEX 2FD 4.500
- Primary Interest:
- All Treasure Hunting
- #1
Thread Owner
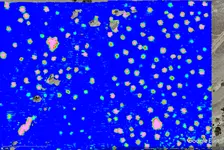
Here are some example results from almost 20 years ago utilizing the Geonics EM63 time domain electromagnetic induction (TDEM) metal detector. At the time the EM63 was the most advanced metal detector in the world for detecting and discriminating unexploded ordnance (UXO). The large coil on the bottom is the transmitter coil and the three smaller coils in the middle are the receiver coils. The receiver coils made a differential measurement between the coils over 27 time gates (recordings spaced in time after the transmitter turns off). The system operates at approximately 10 Hz, so at a normal walking speed of 1 m/s we would have one measurement every 10 cm. The system actually operates at closer to 100 Hz, but averages the data down to 10 Hz to increase the signal to noise ratio. After several years of testing, it was determined that to maximize the functionality of these types of systems that we needed not only data at multiple times on the decay curve but that we also needed better geometry to improve our understanding of the target. This system would be considered a digital geophysical mapping (DGM) instrument while the newest generation of instruments fall into the advanced geophysical classification (AGC) category. We processed the data in Geosoft Oasis Montaj software for basic data cleanup and presenation. We then used the data in the University of British Columbia's (UBC) UXOLab software to perform advanced target detection.
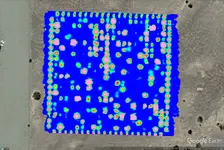
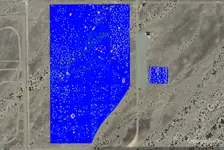
The data was collected at 0.5 m line spacing over the entire site over a period of about a month. The mapped data shows the open field area (the very large area) as well as the calibration site next to it. For the calibration site we knew where all of the targets were, what they were, and their exact depth and orientation. For the open field area, the goal was to detect all of the targets, determine what they were, and their exact location and orientation. I also have a zoomed in picture of the calibration area as well as a zoomed in picture of the open field area. The pictures show myself and my colleague Eric pushing the EM63 with a Trimble RTK GPS receiver attached to it as well as the EM63 up on plastic sawhorses for a calibration measurement. I also included a picture of most of the types of UXO buried at this site.
Let me know if you have any questions about what I have shown here.
The data was collected at 0.5 m line spacing over the entire site over a period of about a month. The mapped data shows the open field area (the very large area) as well as the calibration site next to it. For the calibration site we knew where all of the targets were, what they were, and their exact depth and orientation. For the open field area, the goal was to detect all of the targets, determine what they were, and their exact location and orientation. I also have a zoomed in picture of the calibration area as well as a zoomed in picture of the open field area. The pictures show myself and my colleague Eric pushing the EM63 with a Trimble RTK GPS receiver attached to it as well as the EM63 up on plastic sawhorses for a calibration measurement. I also included a picture of most of the types of UXO buried at this site.
Let me know if you have any questions about what I have shown here.